أعلن فريق من جامعة فلوريدا مؤخرًا عن تطوير نظام جديد للاتصالات تحت الماء يسمى BlueME، والذي من المتوقع أن يحدث ثورة في طريقة تواصل الروبوتات المستقلة تحت الماء مع بعضها البعض ومع الأشخاص الموجودين على السطح. وقال الباحثون إن هذه التكنولوجيا نشأت بعد سنوات من البحث على الأجهزة اللاسلكية القابلة للزرع في الجسم. وتتمثل الفكرة في نقل تجربة الانتشار الكهرومغناطيسي في "بيئة المياه المالحة الخفيفة" لجسم الإنسان إلى وسط مماثل مثل المحيط.
في الوقت الحاضر، طرق الاتصال التقليدية تحت الماء لها حدودها الخاصة. موجات الراديو قليلة الاستخدام تحت الماء، حيث يتم تخفيف الإشارات اللاسلكية العادية بحوالي 1 إلى 10 ديسيبل لكل متر في المياه المالحة، وغالبًا ما يكون ذلك على مسافة بضعة أقدام فقط. على الرغم من أن الاتصال الصوتي يمكن أن يحقق إرسالًا لمسافات أطول، إلا أنه سيتأثر بعوامل مثل إزاحة تردد دوبلر وتداخل المسارات المتعددة، وقد يتسبب أيضًا في تلف الضوضاء للحياة البحرية. تتمتع الأنظمة البصرية بعرض نطاق ترددي مرتفع للغاية في ظل الظروف المثالية، ولكنها تتطلب خط رؤية مباشر. بمجرد تعكر الماء أو تدهور النافذة البصرية بسبب الالتصاق البيولوجي، سينخفض الأداء بشكل كبير. مجتمعة، يمكن لمعظم الروبوتات تحت الماء الآن إما إرسال "حزم نبضات القلب" ذات الحالة القصيرة جدًا، أو يجب أن تظهر بشكل منتظم لتحميل بيانات المهمة، مما يحد بشدة من قدراتها على الحكم الذاتي في الوقت الفعلي.
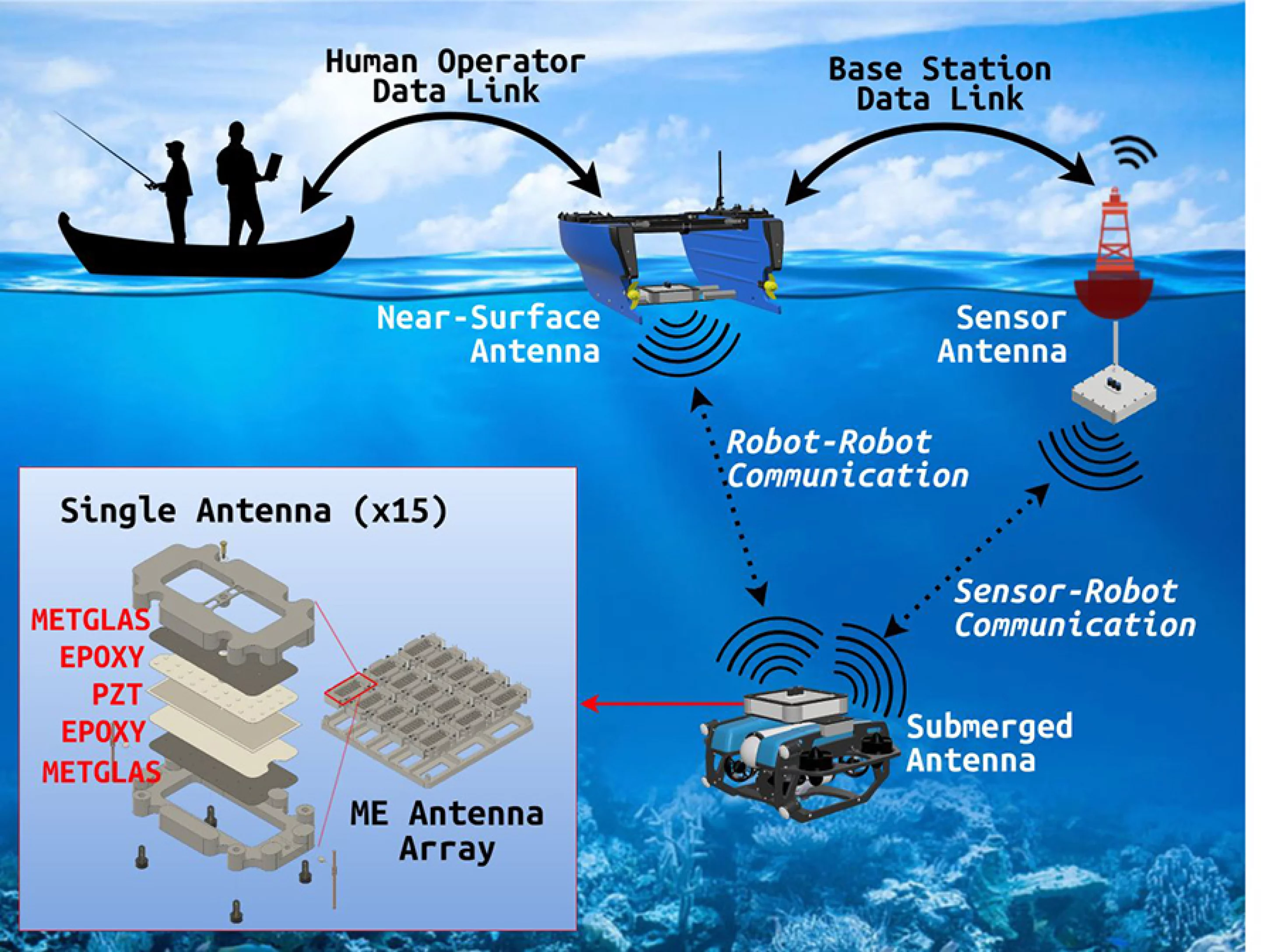
تم تصميم نظام BlueME لمعالجة هذه الاختناقات. يستخدم النظام هوائيًا كهرومغناطيسيًا (ME) للسماح للمركبات المستقلة تحت الماء (AUVs) بتحقيق اتصال بيانات يصل إلى 730 مترًا بينما تستهلك حوالي 10 واط فقط من الطاقة، وهو أقل من مصباح LED المنزلي. ووفقا لفريق البحث، في بيئة المياه العذبة، يمكن لـ BlueME الحفاظ على اتصال مستقر على مسافة 200 متر بقدرة 1 واط فقط، وفي بيئة المياه المالحة، يمكنها تحقيق كشف الإشارة على بعد 730 متر بأقل من 10 واط، ولا تتأثر بتعكر المياه أو العوائق أو التداخل متعدد المسارات.
الابتكار الأساسي لهذا النظام هو دمج المواد المغناطيسية مع المواد الخزفية الكهروضغطية لتشكيل هوائي كهرومغناطيسي. على وجه التحديد، يقوم المجال المغناطيسي الخارجي بتشويه الطبقة المغناطيسية التي تسمى Metglas، وهذا التشوه الميكانيكي يحفز الطبقة الكهرضغطية PZT المجاورة لتوليد الجهد الكهربائي؛ يمكن للعملية العكسية إكمال انبعاث الإشارة. بفضل تصميم الاقتران الكهروميكانيكي هذا، يمكن للهوائي أن يعمل في نطاق تردد منخفض جدًا يبلغ حوالي 35 إلى 36 كيلو هرتز بينما يكون أصغر بكثير من الهوائيات الكهربائية التقليدية ذات التردد نفسه.
يتكون نظام BlueME الكامل من 15 من هذه الهوائيات في مصفوفة 3×5، موضوعة في غلاف مقاوم للماء معوض بالزيت لموازنة الضغط الهيدروستاتيكي الهائل الموجود في بيئات المياه العميقة. ومن المثير للاهتمام أن الباحثين وجدوا أن أداء هذا الهوائي الكهرومغناطيسي تحسن بعد دخول الماء: عند 36 كيلو هرتز، كان الطول الموجي للإشارة حوالي 8327 مترًا في الهواء، ولكن تم ضغطه إلى حوالي 170 مترًا في المياه العذبة، مما أدى إلى تحسين كفاءة الإشعاع للهوائي الصغير بشكل كبير. يعمل الإرسال المشترك للهوائيات المتعددة على تضخيم الطاقة المشعة بنحو 225 مرة مقارنة بهوائي واحد. إلى جانب مجموعة الاستقبال المطابقة، يمكن أن يصل كسب الارتباط النظري إلى حوالي 119 ديسيبل.
يشترك في قيادة المشروع آدم خليفة ومحمد جاهد الإسلام، وقد تم قبول نتائج البحث من قبل IEEE Transactions on Ocean Engineering. يتذكر خليفة، الذي شارك منذ فترة طويلة في تصميم الأجهزة اللاسلكية الدقيقة القابلة للزرع، أنه في أحد الأيام أدرك فجأة أوجه التشابه في الخصائص الفيزيائية لجسم الإنسان والمحيط: "تتكون أجسادنا بشكل أساسي من مياه مالحة خفيفة، مما جعلنا نبدأ في التفكير في اتصالات المحيطات بطريقة مختلفة تمامًا".
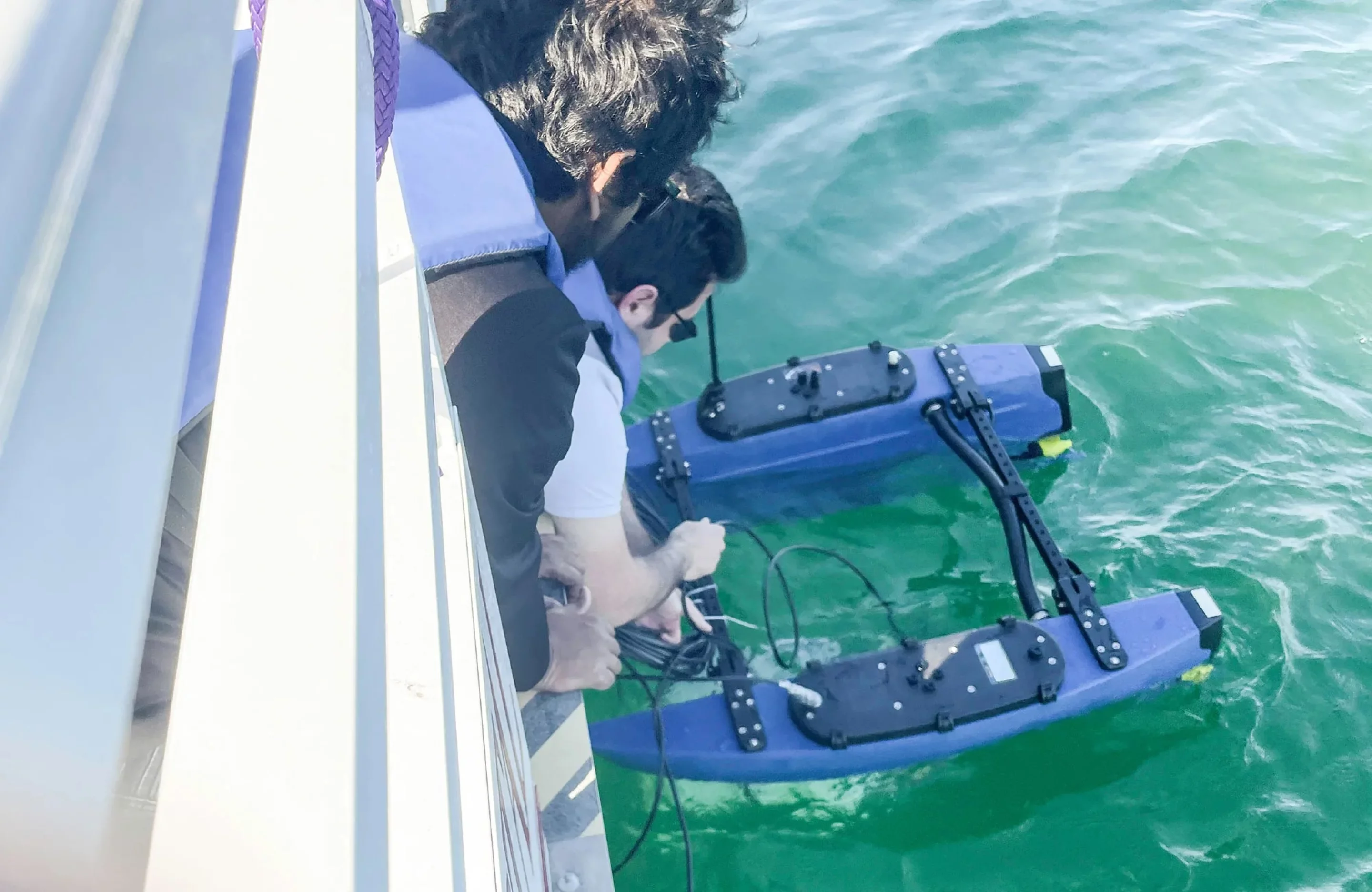
وفي اختبار المياه المفتوحة، أجرى الفريق تجارب ميدانية في بحيرة واربورغ (المياه العذبة) في غينزفيل، فلوريدا، وساحل خليج فلوريدا (المياه المالحة) للتحقق من أداء النظام في ظل ظروف مائية مختلفة. وتظهر التجارب أن BlueME يمكنه الحفاظ على رابط مستقر بغض النظر عن تعكر المسطح المائي أو وجود عوائق أو انعكاسات متعددة المسارات، وهو ما له أهمية عملية للعمليات تحت الماء في البيئات البحرية المعقدة.
فيما يتعلق بمعدلات البيانات، تحقق BlueME حاليًا عمليات نقل تبلغ حوالي 1 كيلو بايت / ثانية إلى 100 كيلو بايت / ثانية، وهو أقل بكثير من سرعات الجيجابت التي يمكن أن تحققها الأنظمة البصرية في ظل الظروف المثالية. ومع ذلك، أكد فريق البحث أن الهدف التصميمي للنظام منذ البداية لم يكن السعي وراء عرض نطاق ترددي مرتفع للغاية، بل تحقيق استهلاك منخفض للطاقة، ومسافة طويلة، واستقرار، ورابط ثنائي الاتجاه مع تأثير أقل على البيئة. "من المتصور أن يقوم الروبوت بإبلاغك بتقدم المهمة كل 10 دقائق، ويمكن للمشغل الحكم على المهمة وتعديلها في الوقت الفعلي بناءً على ذلك، وهو أمر بالغ الأهمية بما يكفي لتحسين مرونة العمليات تحت الماء." قال الإسلام.
وأشار مؤلف الورقة إلى أن هذه هي المرة الأولى التي يتم فيها نشر هوائي كهرومغناطيسي على مستوى عملي في بيئة خارجية، كما أنه أحد أكبر مصفوفات الهوائيات الكهرومغناطيسية VLF/LF حتى الآن. وقد قدم الفريق الآن طلبًا مؤقتًا للحصول على براءة اختراع ويسعى للحصول على مزيد من التمويل لتحسين الأجهزة وإجراء تجارب رحلة إضافية على منصة مركبة ذاتية التحكم واسعة النطاق تحت الماء. تتضمن التطبيقات المستقبلية المتوقعة سيناريوهات رئيسية مثل الملاحة التشكيلية التعاونية، ورسم خرائط تضاريس قاع البحر، وتحديد المواقع في الوقت الفعلي.
"لقد حققنا النتائج الحالية بموارد أولية محدودة للغاية." وشدد خليفة على أنه إذا أمكن الحصول على استثمار هندسي خاص في المستقبل وتحقيق النشر على نطاق أوسع، فإن إمكانات هذه المنصة ستتجاوز بكثير القدرات المعروضة حاليًا. ووصف إسلام المرحلة الحالية بأنها "فترة مبكرة جدًا لمنتج ذو إمكانات كبيرة"، مشيرًا إلى أن شركة BlueME لا تزال تتمتع بخيال هائل في مجال تطبيقات الاتصالات تحت الماء وحتى الروبوتات البحرية.