أطلق فريق من جامعة رايس في الولايات المتحدة مؤخراً نظام رادار جديد على جانب الطريق يسمى EyeDAR، والذي من المتوقع أن يزود المركبات ذاتية القيادة بقدرات استشعار موسعة مماثلة لـ "العين الثالثة". وقال الباحثون إن هذه التكنولوجيا يمكن أن تحسن بشكل كبير دقة الإدراك البيئي وتكرار السلامة للمركبات ذاتية القيادة من خلال نقل معلومات المرور الرئيسية مرة أخرى إلى النظام المثبت على السيارة من خلال أجهزة رادار الموجات المليمترية المنتشرة على البنية التحتية للطرق.
تعتمد القيادة الذاتية الحالية بشكل أساسي على الكاميرات المدمجة، وتقنية الليدار (LiDAR) والرادار التقليدي للعمل معًا: الكاميرا مسؤولة عن تحديد المشاة والمركبات وإشارات المرور، ويستخدم LiDAR نبضات الليزر لبناء سحابة نقطية ثلاثية الأبعاد عالية الدقة لتعويض أوجه القصور في الرؤية والرادار في إدراك العمق المكاني. ومع ذلك، كلاهما عرضة للطقس القاسي مثل المطر والثلج والضباب وما إلى ذلك. يحقق الرادار كشف الهدف دون الاعتماد على الضوء والطقس عن طريق إرسال واستقبال موجات الراديو. ومع ذلك، في بيئة الطريق الفعلية، غالبًا ما تعكس الأجسام المكتشفة كمية صغيرة فقط من الإشارات، وينتشر عدد كبير من موجات الرادار حولها، مما يؤدي إلى عدم اكتمال المعلومات التي يتلقاها رادار السيارة، مما يجعل من الصعب تحديد المخاطر المحتملة بدقة مثل المشاة والمركبات المحجوبين أو المحظورين جزئيًا في الوقت المناسب.
مع تحرك الشاحنات ذاتية القيادة وروبوتات التوصيل وما إلى ذلك تدريجيًا نحو التسويق التجاري، فإن محدودية أجهزة الاستشعار في "عدم القدرة على الرؤية بوضوح أو بعيدًا" في ظروف الطرق المعقدة يُنظر إليها بشكل متزايد على أنها عيب في السلامة. ويحاول فريق جامعة رايس توسيع نظام الإدراك من المركبات إلى البنية التحتية على جانب الطريق، وذلك باستخدام EyeDAR لملء النقاط العمياء وفجوات المعلومات. يعتمد هذا الجهاز تصميم رادار بموجة ملليمترية منخفضة الطاقة ويمكن تثبيته على المرافق الموجودة على جانب الطريق مثل إشارات المرور وإشارات المرور واللوحات الإعلانية. فهو "يجمع" الموجات المنعكسة المنتشرة أصلاً في البيئة، ويحولها إلى وصف أكثر اكتمالاً للمشاركين في حركة المرور المحيطة، ويرسلها مرة أخرى إلى نظام الرادار الموجود على متن السيارة.
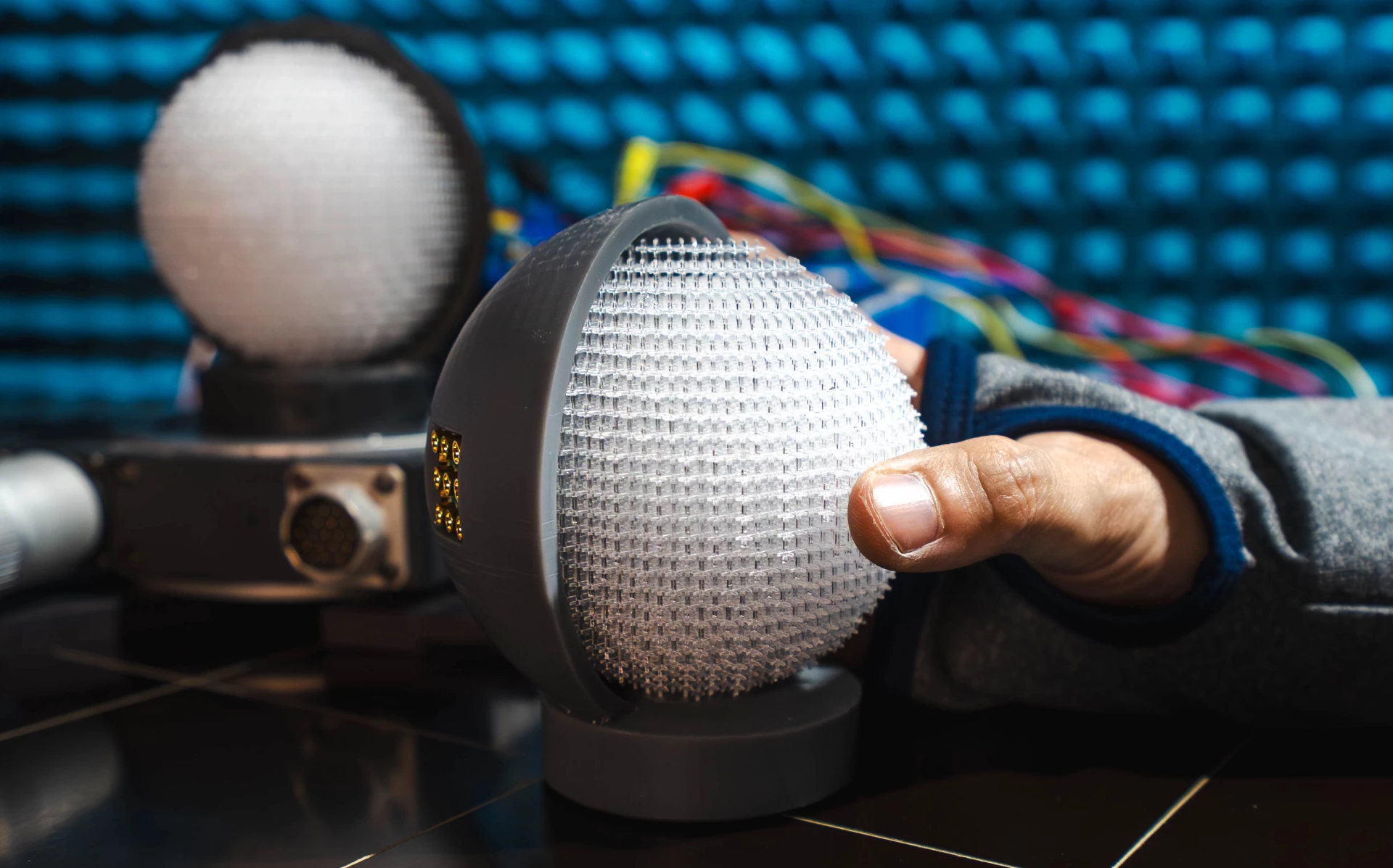
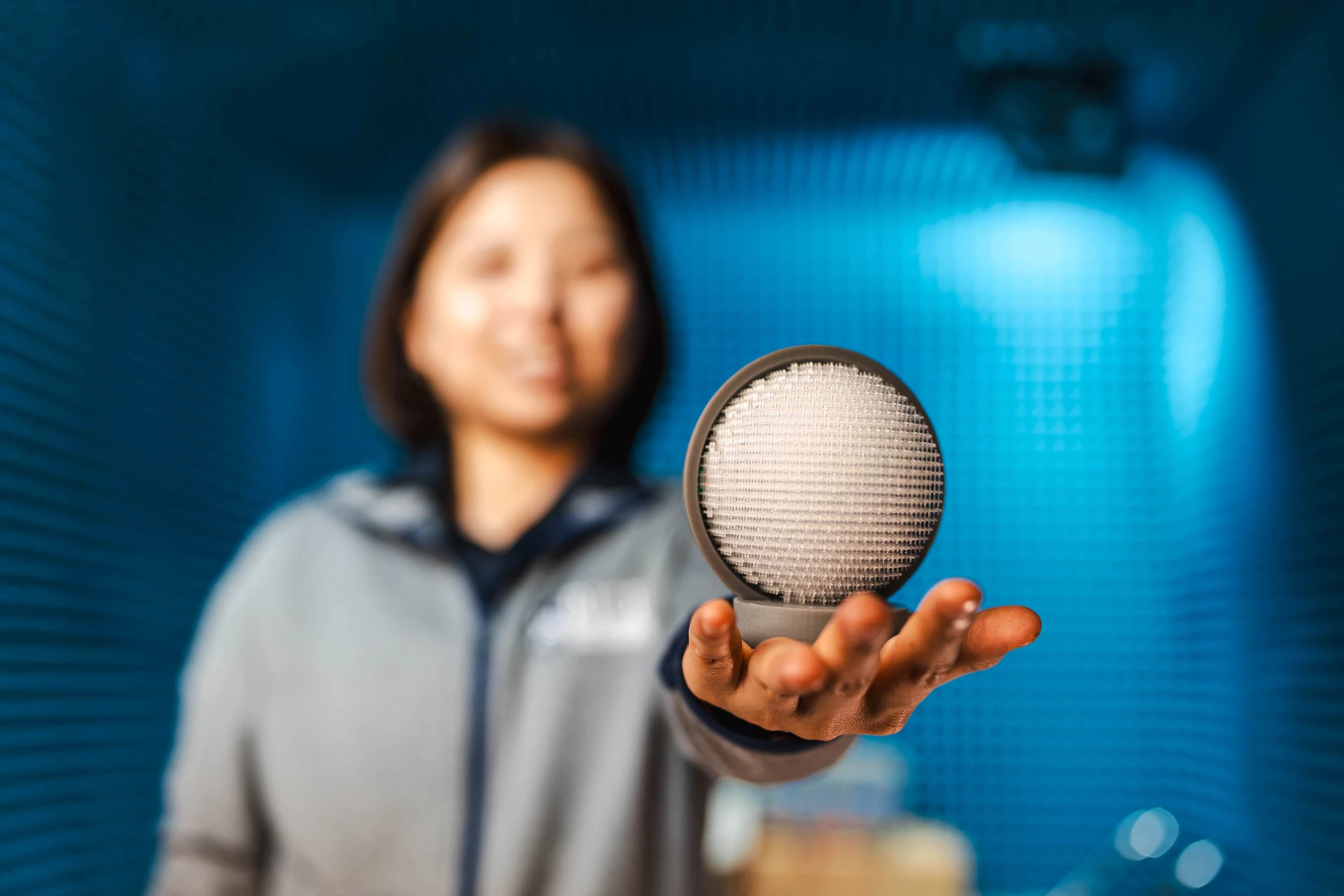
جوهر EyeDAR هو وحدة استشعار بحجم برتقالة تقريبًا، مكونة من جزأين يشبهان "العدسة" و"شبكية العين": الواجهة الأمامية عبارة عن عدسة من مادة Luneburg مصنوعة باستخدام تقنية الطباعة ثلاثية الأبعاد، والتي تُستخدم لتركيز إشارات الراديو بدقة من اتجاهات مختلفة إلى تركيز ثابت؛ يليه صف من صفائف الهوائيات المرتبة بشكل وثيق، المسؤولة عن استقبال وتحليل المعلومات المكانية لهذه الإشارات المركزة، ومن ثم إعادتها إلى نظام رادار السيارات. على عكس حلول الرادار التقليدية التي تتطلب مصفوفات هوائي واسعة النطاق وحسابات رقمية معقدة لإكمال تكوين الشعاع ومعالجة الإشارات، يعتمد EyeDAR على الهيكل المادي للعدسة نفسها لإكمال قدر كبير من أعمال "المعالجة المسبقة"، مما يبسط العبء على الأجهزة الإلكترونية والخوارزميات بشكل كبير.
وبحسب فريق البحث، تتكون هذه العدسة من أكثر من 8000 وحدة صغيرة ذات أشكال ومؤشرات انكسار مختلفة. تم تصميم موضع ومعلمات كل وحدة بعناية بحيث يمكن للمادة الإجمالية الانحناء والتركيز بطريقة محددة عند مرور الموجات الكهرومغناطيسية. وهو في الأساس معالج إشارات تناظري "أجهزة-أجهزة". من خلال هيكل المادة الخارقة هذا، يمكن لـ EyeDAR إكمال الحساب المسبق للمعلومات المكانية "على الفور" أثناء عملية الإرسال بسرعة الضوء، مما يلغي الحاجة إلى قدر كبير من المعالجة الرقمية التي تستغرق وقتًا طويلاً وتستهلك الطاقة في الرادار التقليدي. وأظهرت النتائج التجريبية أن النظام قادر على تحديد اتجاهات الهدف بشكل أسرع بأكثر من 200 مرة من الرادار التقليدي، وهو ما يعتبر قفزة أداء كبيرة في المعالجة التناظرية مقارنة بالمعالجة الرقمية.

على عكس الرادار التقليدي على جانب الطريق أو معدات الإرسال النشطة، فإن EyeDAR نفسه لا يولد موجات كهرومغناطيسية جديدة. وبدلاً من ذلك، فهو يركز على جمع الأصداء "المتبقية" المنتشرة إلى الخارج بعد أن تكتشف المركبة الهدف، ثم يقوم بتصفيتها وإعادة بنائها، ويعكس الإشارة "المنظفة" مرة أخرى إلى الرادار المثبت على المركبة. ويعتقد الباحثون أن هذا التصميم، وهو مدمج ومنخفض التكلفة، وله بنية بسيطة ويعتمد على معالجة محاكاة فائقة السرعة، من المتوقع أن يدعم التوسع على نطاق واسع على طول الطرق الحضرية والطرق السريعة، وبالتالي تشكيل شبكة بنية تحتية تخدم "الرؤية البعيدة" و"المنظور" للمركبات ذاتية القيادة.
ومع ذلك، يظل خبير التصنيع إيميكا مورونو حذرًا بشأن ما إذا كان من الممكن تنفيذ الخطة بالفعل. وأشار إلى أنه على الرغم من أن النماذج النظرية والبيانات التجريبية مثيرة، إلا أنها مهمة هندسية صعبة للغاية لتكرار آلاف الوحدات المجهرية بشكل ثابت لفترة طويلة في الإنتاج الفعلي والتأكد من الحفاظ على الدقة والأداء الهندسي في البيئات الخارجية القاسية مثل التعرض لدرجات الحرارة العالية والبرد الشديد والتجمد. قد يصبح هذا أيضًا أحد أكبر العتبات التي يجب أن تخرج بها EyeDAR من المختبر وتتجه نحو النشر على نطاق واسع.
على الرغم من عدم اليقين المحيط بالمستقبل، يعتقد فريق جامعة رايس أن EyeDAR يوضح إمكانات رادار المواد الاصطناعية على الطريق من أجل سلامة القيادة الذاتية. بمجرد نشرها على نطاق واسع، يمكن للمركبات الاعتماد على "العيون الموجودة على جانب الطريق" للحصول على معلومات عن حالة الطريق خارج نطاق الكشف لأجهزة الاستشعار الخاصة بها، والكشف المبكر عن المشاركين في حركة المرور حول الزوايا والمشاة أو المركبات التي تحجبها العوائق الكبيرة، وبالتالي تحسين تكرار السلامة لنظام النقل العام. ويتوقع الباحثون أيضًا أن هذه التكنولوجيا يمكن أيضًا توسيعها لتشمل سيناريوهات التطبيقات مثل الطائرات بدون طيار والروبوتات والمراقبة الأمنية في المستقبل، مما يوفر دعمًا أكثر موثوقية للإدراك البيئي لمجموعة متنوعة من الأنظمة المستقلة.