قام فريق بحث في جامعة وست فرجينيا في الولايات المتحدة مؤخراً بتطوير يد روبوتية ناعمة وقوية، لا يمكنها فقط قطف الفواكه والخضروات الهشة مثل الفراولة بلطف، بل يمكنها أيضًا الحكم بشكل شامل على النضج من خلال اللمس والرؤية أثناء عملية القطف، والتي من المتوقع أن تقلل بشكل كبير من تكاليف العمالة ومعدلات الهدر في عملية القطف.
ووفقا للتقارير، أصبحت الزراعة واحدة من الصناعات التي تتأثر بشكل متزايد بالتكنولوجيا الروبوتية. يواجه المزارعون في العديد من المناطق حول العالم ضغطًا مزدوجًا يتمثل في نقص العمالة وارتفاع تكاليف العمالة. وفي بعض المحاصيل، تصل تكاليف القطف اليدوي إلى ما يقرب من نصف إجمالي تكاليف الإنتاج. بالنسبة للفواكه والخضروات ذات فترات قطف قصيرة للغاية وسهلة التعرض للكدمات، مثل الفراولة والتوت والأفوكادو، غالبًا ما يكون من الصعب تحقيق التوازن بين الكفاءة والخسارة مع القطف اليدوي التقليدي أو القطف الميكانيكي الصلب. ونتيجة لذلك، قد يخسر المزارعون ما يصل إلى ربع إنتاجهم.
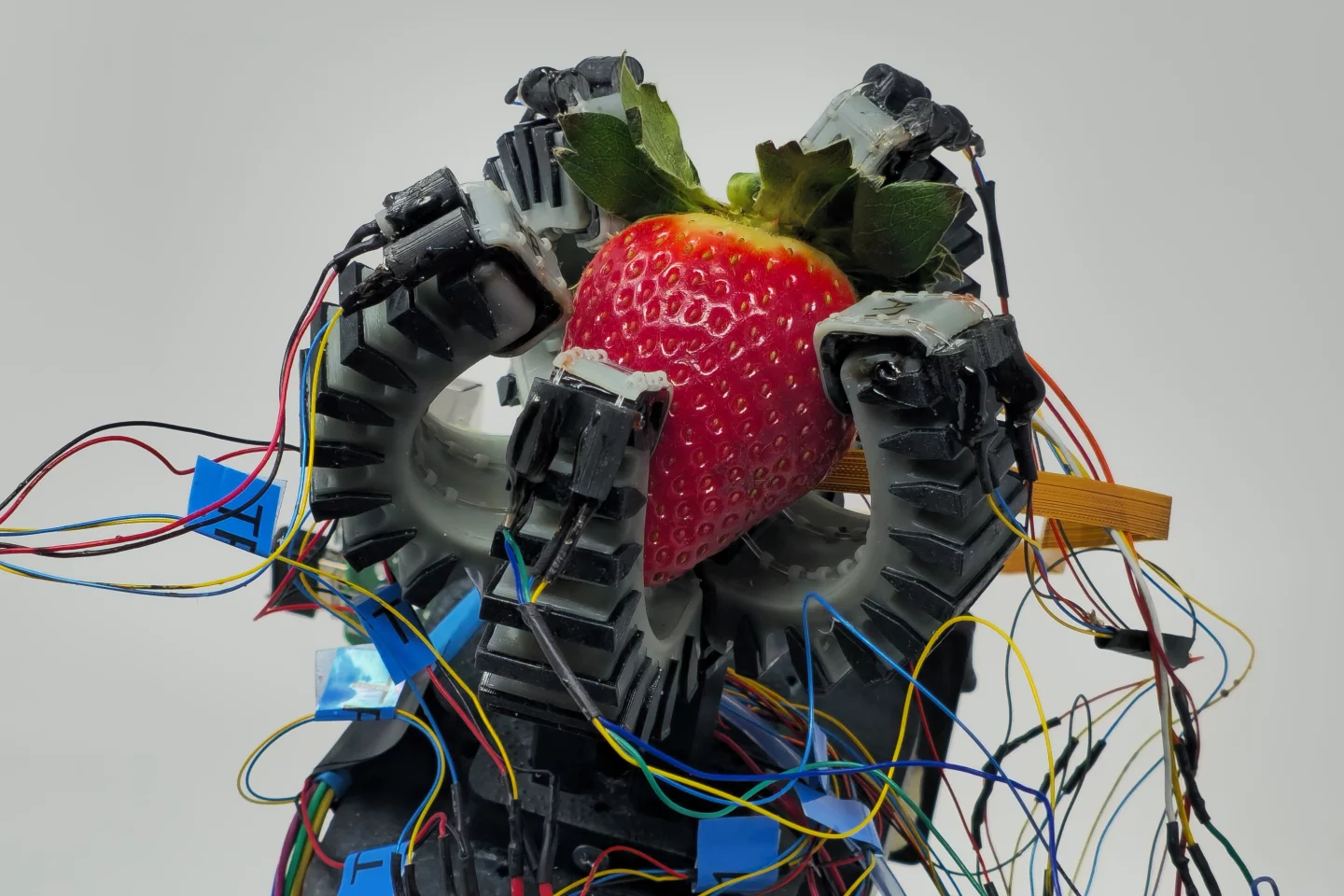
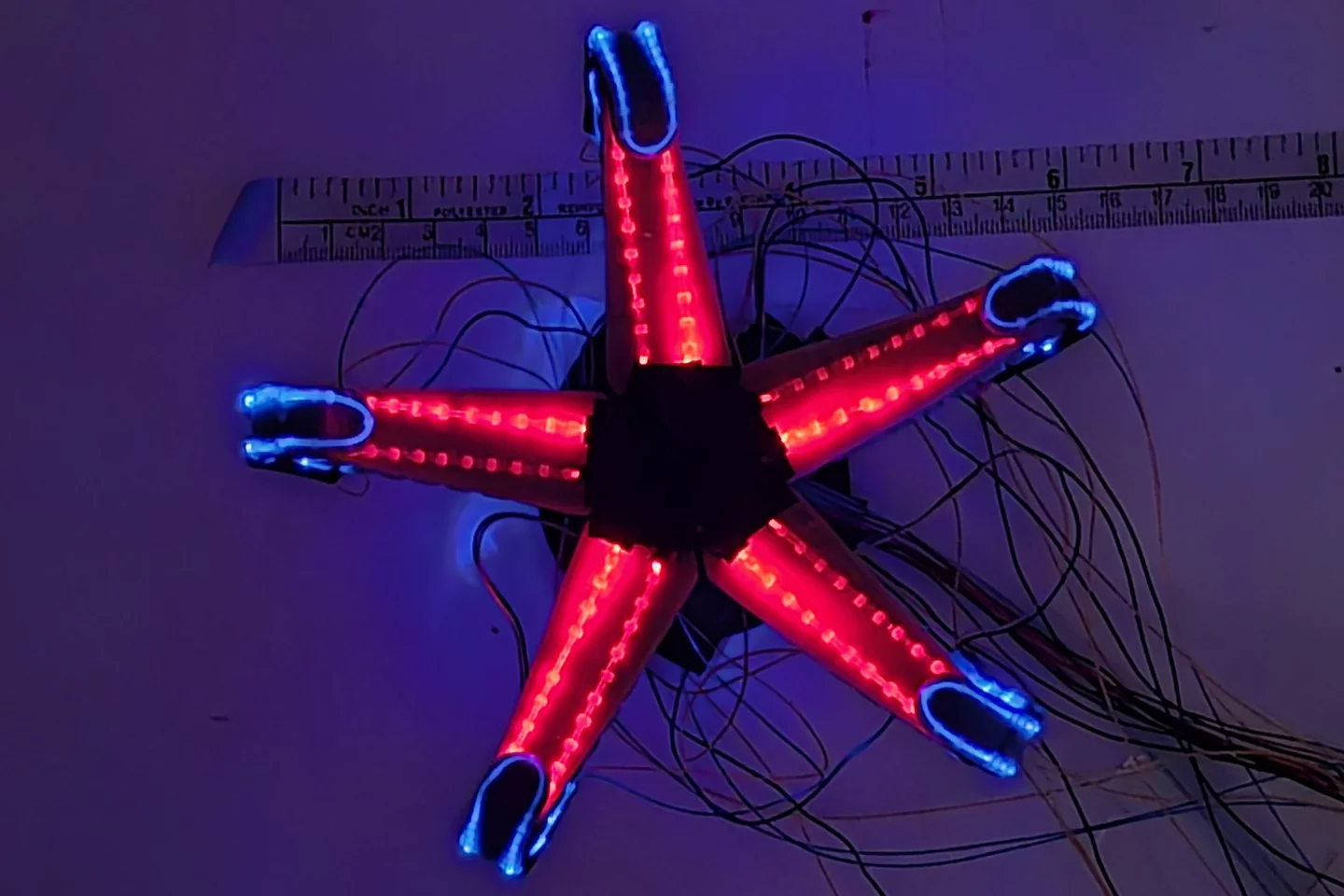
ويعمل فريق "Robiotics Lab" في جامعة وست فرجينيا على تطوير روبوتات تحاكي حركة الحيوانات. يد الروبوت الناعمة التي تم إطلاقها هذه المرة ليست "المخلب الميكانيكي" المعدني الذي يفكر فيه الناس. وبدلاً من ذلك، فهو مستوحى من تشريح نجم البحر ويستخدم مواد السيليكون والبولي يوريثين لصنع أصابع ناعمة. وفي الوقت نفسه، لا يزال الشكل العام يحتفظ بتصميم مكون من خمسة أصابع مشابه لشكل يد الإنسان، بحيث يمكنه التقاط الفاكهة والاحتفاظ بها بشكل طبيعي أكثر.
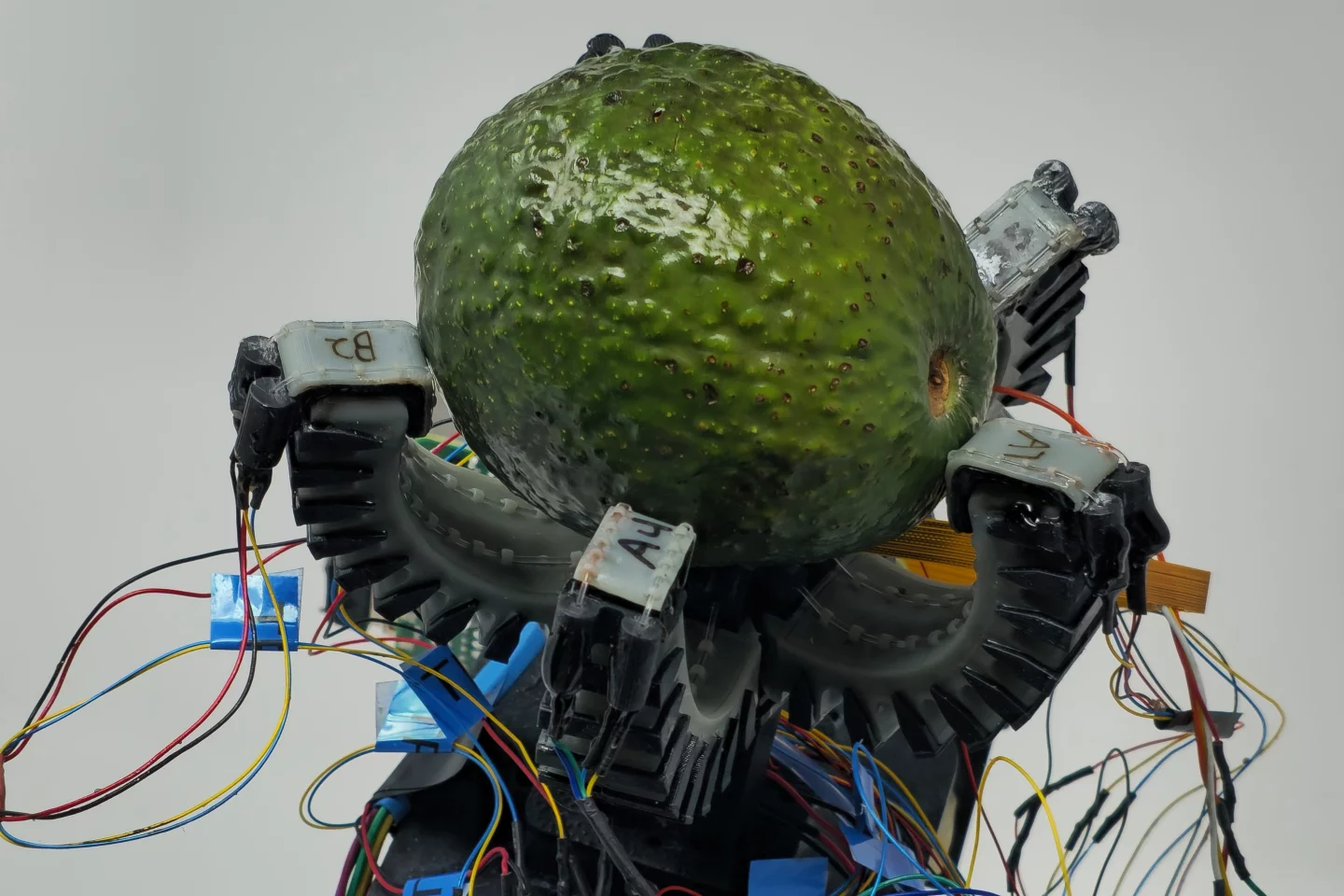
وفيما يتعلق بقدرات الإدراك، فقد تم تجهيز هذه اليد الروبوتية الجديدة بكاميرا مصغرة للحكم البصري على مظهر الفاكهة. وقد تم تطبيق هذه الوظيفة على بعض الروبوتات الزراعية. ومع ذلك، أشار الباحثون إلى أن الاعتماد فقط على المظهر لا يكفي للحكم بدقة على النضج. إذا أخذنا الأفوكادو كمثال، فغالبًا ما نحتاج إلى استشعار نضجها من خلال قرصها بلطف. تعد كيفية السماح للروبوت بتعلم هذا الحكم "البديهي البشري" إحدى الصعوبات الرئيسية في هذا البحث.
ولحل هذه المشكلة، قام فريق البحث بدمج أجهزة استشعار خاصة باللمس داخل الأصابع الناعمة، بحيث عندما يضغط الروبوت بلطف على الفاكهة، يمكنه الحصول على معلومات فيزيائية حول الصلابة والمرونة دون سحق الفاكهة. يمكن لهذه المستشعرات أيضًا مراقبة قوة التحمل في الوقت الفعلي. عندما يحدد النظام أن القبضة الحالية ليست ثابتة بما فيه الكفاية، سيقوم الروبوت تلقائيًا بضبط القوة لمنع الفاكهة من الانزلاق أو السقوط على الأرض.
خلال مرحلة الاختبار، أظهرت يد الروبوت دقة عالية في الإدراك والتحكم، وتمكن المستشعر من التنبؤ بشكل الفاكهة التي تم التقاطها بدقة تصل إلى 100% تقريبًا. يزن النموذج الأولي للجهاز أقل من 65 جرامًا، ويستغرق أقل من ثانيتين للفتح والإغلاق مرة واحدة، ويمكنه رفع جسم يصل وزنه إلى حوالي 1 كيلوجرام كحد أقصى، مما يوفر الشروط الأساسية للوزن الخفيف وسرعة الاستجابة للتكامل الفعلي للآلات الزراعية.
وقال قائد المشروع أناند ميشرا، الأستاذ المساعد في قسم الهندسة الميكانيكية والمواد وهندسة الفضاء الجوي، إن الفريق يخطط لجلب تكنولوجيا استيعاب البرمجيات هذه إلى السوق العالمية في السنتين إلى الأربع سنوات القادمة، ويعمل على تطوير جهاز استيعاب أكثر قابلية للتطوير لتلبية احتياجات النشر على نطاق واسع في هذا المجال. ويشعر الباحثون أيضًا بالتفاؤل بشأن آفاق تطبيق هذه التكنولوجيا في نطاق أوسع من السيناريوهات، بما في ذلك الاستيلاء على الأجسام الغريبة في المهمات الفضائية، واستكشاف البيئة تحت الماء، والتشغيل الآمن للأنسجة والأعضاء الهشة في مجال الرعاية الطبية.

وقد تم نشر الأوراق البحثية ذات الصلة في مجلة "Nature Communications"، والتي توضح أن حلول الإمساك بالروبوتات التي تجمع بين الهياكل البرمجية واستشعار الألياف الضوئية وأنظمة الرؤية أصبحت مسارًا تقنيًا مهمًا لسيناريوهات عالية الخسارة وعالية الدقة. وأشار الباحثون إلى أنه مع تحرك هذه الروبوتات الناعمة تدريجيًا نحو التسويق التجاري، فمن المتوقع أن تتحسن بشكل كبير نسبة الضغط البشري ونفايات الفاكهة والخضروات في المزرعة، مما يوفر أساسًا جديدًا للأدوات لتطوير الزراعة الدقيقة والآلات الزراعية الذكية.