تعمل Niantic على تحويل نفس تقنية الواقع المعزز العالمية التي أبقت بيكاتشو راسخًا بقوة على الأرصفة في العالم الحقيقي لتوجيه بطل الرواية الأكثر واقعية - وهو روبوت توصيل يتنقل عبر الرصيف بحثًا عن رقم المنزل الصحيح. من خلال بيانات تحديد الموقع وصور التجوّل الافتراضي المتراكمة على مر السنين، توفر الشركة الآن خدمات تحديد المواقع المرئية بدقة على مستوى السنتيمتر لشركات مثل Coco Robotics، وعلى وجه التحديد حل المشكلة القديمة المتمثلة في "فقدان" نظام تحديد المواقع العالمي (GPS) التقليدي في المدن ذات المباني الشاهقة.

Niantic Spatial هي شركة منبثقة عن الذكاء الاصطناعي أسستها Niantic في عام 2025 وتتخصص في استخلاص سنوات من بيانات الألعاب المحمولة وتحويلها إلى "نماذج عالمية" دقيقة للغاية في العالم الحقيقي. وفقًا للوصف الرسمي، فإن هذا هو نظام تحديد المواقع المرئي (VPS) الذي يمكنه تحديد موضع الجهاز واتجاهه ضمن نطاق سنتيمتر من خلال الاعتماد فقط على صور الكاميرا وسياق الخريطة، ويقدم خدمات للعالم الخارجي من خلال واجهات تجارية. وأول شريك تجاري لها على نطاق واسع هو شركة Coco Robotics، وهي شركة التسليم النهائي التي تدير حوالي ألف روبوت على الرصيف في العديد من المدن الأوروبية والأمريكية. غالبًا ما تكون إشارات الأقمار الصناعية المحلية صاخبة جدًا بحيث لا تدعم القيادة الذاتية الموثوقة.
ليس من الصعب وصف المشكلة التقنية التي تحتاج شركة Niantic Spatial إلى حلها، ولكن من الصعب جدًا التغلب عليها حقًا: في بيئة حضرية عالية الكثافة، تنعكس إشارات نظام تحديد المواقع العالمي (GPS) بين جدران الستائر الزجاجية والخرسانة، ويمكن أن تصل أخطاء تحديد الموقع بسهولة إلى عشرات الأمتار. بالنسبة لروبوت التوصيل، فإن هذا الانحراف يكفي لينتهي به الأمر في الحي الخطأ، أو حتى على الجانب الآخر من الشارع. يبحر روبوت Coco بسرعة حوالي خمسة أميال في الساعة ويمكنه توصيل العديد من البيتزا كبيرة الحجم أو أكياس البقالة في وقت واحد. وإذا أرادت مواكبة الركاب البشر من حيث الالتزام بالمواعيد ودقة الاستلام والتسليم، فيجب عليها الاعتماد على قدرات ملاحية أكثر استقرارًا ودقة.
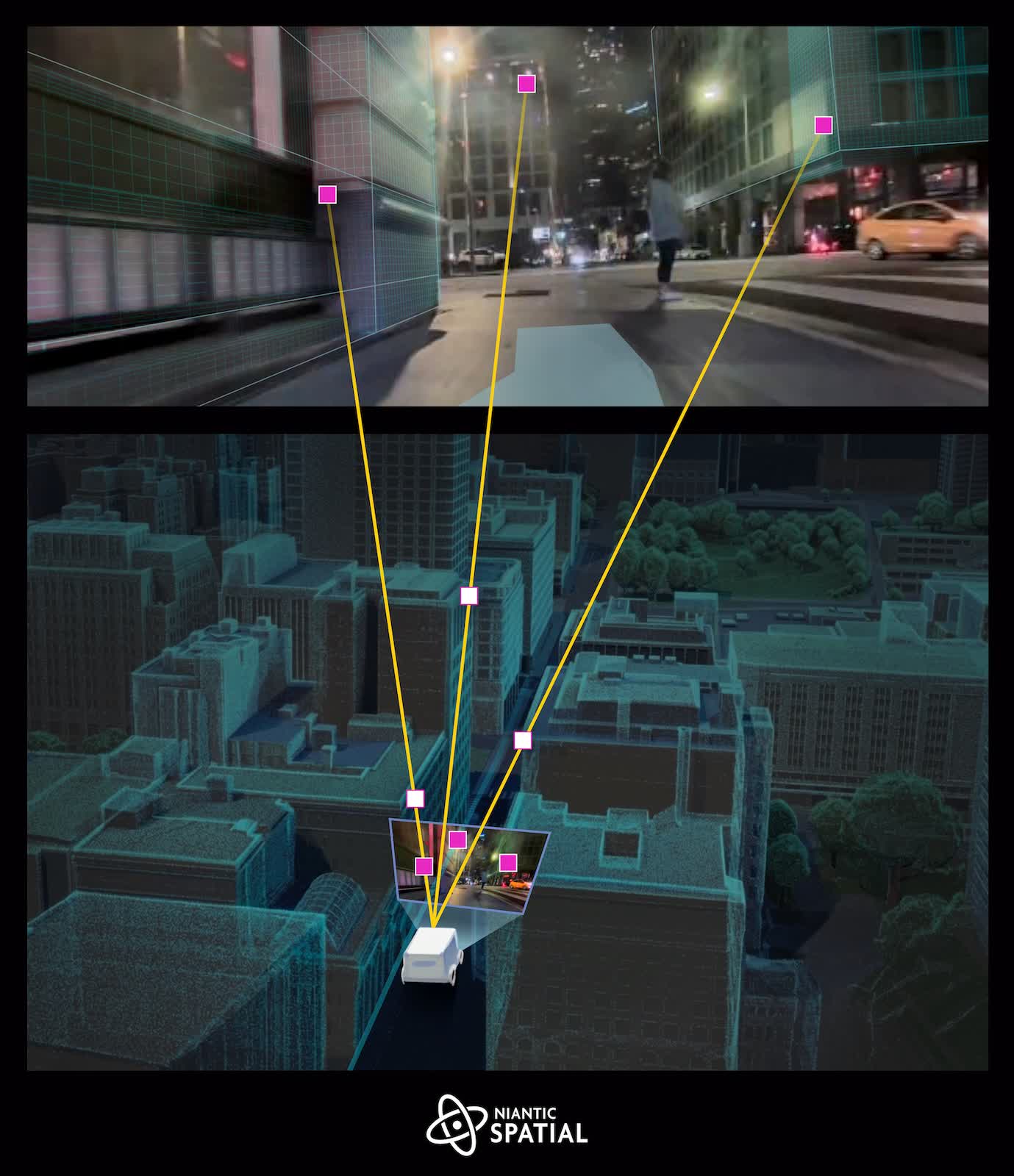
البديل الذي تقدمه Niantic Spatial هو نظام تحديد المواقع البصري الذي يعتمد على "الرؤية" بدلاً من إشارات الراديو. لسنوات، كانت الشركة تجمع البيانات من Pokémon Go ولعبة الواقع المعزز السابقة Ingress، وكلاهما يشجع اللاعبين على زيارة صالات الألعاب الرياضية في العالم الحقيقي، وساحات القتال، ونقاط الاهتمام المختلفة. تقوم آلية اللعبة هذه بشكل غير مرئي ببناء مجموعة كثيفة من مجموعات البيانات الحضرية العالمية: الصور الضخمة التي يلتقطها اللاعبون في البيئة الحضرية ترتبط بدقة بخط الطول وخط العرض، واتجاه الكاميرا، ووضعية الجهاز، وحالة الحركة وبيانات الاستشعار الأخرى المسجلة بواسطة الهاتف المحمول.
وفقًا لشركة Niantic Spatial، تحتوي بيانات التدريب النموذجية الخاصة بها على ما يقرب من 30 مليار صورة، متجمعة بشكل كبير حول أكثر من مليون موقع "نقطة ساخنة" يتم تصويرها بشكل متكرر من زوايا مختلفة، وفي أوقات مختلفة من اليوم، وفي ظروف جوية مختلفة. نظرًا لأن كل إطار يتوافق مع تقدير الوضع على مستوى السنتيمتر، فإن مجموعة التدريب هذه تشكل أساسًا عينة ثلاثية الأبعاد متعددة العرض، تغطي شوارع المدينة، ومعابر المشاة، وواجهات المتاجر، وواجهات المباني. وعلى هذا الأساس، يمكن للنموذج أن يستنتج الموقع والاتجاه الدقيق من عدد صغير من الصور الملتقطة في الوقت الفعلي، حتى في المناطق التي لا تكون فيها تغطية البيانات الأصلية كثيفة مثل هذه النقاط الساخنة.
بالنسبة لشركة Coco، هذا يعني أن الروبوتات الخاصة بها يمكنها دمج إشارات نظام تحديد المواقع العالمي (GPS) مع نتائج تحديد موقع الكاميرا التي تقدمها Niantic Spatial. وقد تم تجهيز كل روبوت بأربع كاميرات مثبتة على "ارتفاع الورك" للتصوير من أربعة اتجاهات. ويختلف هذا المنظور عن منظور البشر الذين يحملون هاتفًا محمولاً في أيديهم، لكن كوكو قال إن تكييف هذا النوع من البيانات مع النماذج الحالية أمر بديهي نسبيًا. في الوقت الحاضر، أكملت هذه الروبوتات مئات الآلاف من عمليات التسليم في لوس أنجلوس وشيكاغو وميامي وجيرسي سيتي وهلسنكي وأماكن أخرى، وقطعت أكثر من مليون ميل إجمالاً، مما يوفر للشركة خط أساس لتقييم تحسين موثوقية النظام الجديد.

إن تحديد المواقع المرئية في حد ذاتها ليست مفهومًا جديدًا، ولكنها كانت محدودة منذ فترة طويلة بسبب كثافة المجموعة وتغطية الصور عالية الجودة. تراهن شركة Niantic Spatial على أن حجم وتنوع بيانات الألعاب الجماعية الخاصة بها سوف يتفوق على المنافسين الذين يعتمدون بشكل أساسي على أساطيل أجهزة الاستشعار الخاصة بهم لجمع الخرائط. عادةً ما تقوم بعض الشركات المصنعة لروبوتات التوصيل الأخرى (مثل Starship Technologies) ببناء خرائط محلية ثلاثية الأبعاد على مسار الجري من خلال أجهزة الاستشعار الخاصة بها، وتسجيل الأرصفة، وإشارات الشوارع، ومخططات البناء، وما إلى ذلك، ثم إعادة استخدام هذه الخرائط أثناء الرحلات اللاحقة. في المقابل، تأمل Niantic Spatial في الحفاظ على نموذج جغرافي مكاني مشترك عالميًا وإتاحته من خلال واجهة برمجة التطبيقات لأي روبوت أو هاتف أو سماعة رأس تحتاج إلى تحديد المواقع بدقة.
تطلق Niantic على هذا النموذج اسم "الخريطة الحية": تمثيل افتراضي للعالم يتم تحديثه بأجهزة استشعار في جميع الأوقات. بينما تتنقل روبوتات Coco والمزيد من الشركاء المستقبليين في الشوارع والأرصفة، ستستمر أجهزة الاستشعار الخاصة بهم في تقديم ملاحظات جديدة تُستخدم لتصحيح وتوسيع خريطة Niantic Spatial الأساسية. الهدف ليس مجرد دقة هندسية، ولكن أيضًا الفهم الدلالي - شرح ووصف أنواع مختلفة من الكائنات في الخريطة بطريقة يمكن فهمها آليًا.
ويرى المسؤولون التنفيذيون في شركة Niantic أن هذا الجهد جزء من تطور طويل المدى للخرائط الرقمية، وليس تغييرًا كاملاً. من الخرائط ثنائية الأبعاد إلى الخرائط ثلاثية الأبعاد والآن إلى العالم التناظري الذي يتجه نحو "التوائم الرقمية" الديناميكية، يظل الاتصال الأساسي بين إحداثيات الخريطة والفضاء المادي دون تغيير. ما تغير حقاً هو "المستهلك الرئيسي" لمثل هذه الخرائط: من البشر في الماضي إلى الآلات. ومن هذا المنظور، فإن الذكاء المكاني الذي تم استخدامه للتأكد من وقوف بيكاتشو الافتراضي بثبات على الرصيف يتم الآن زرعه في روبوت توصيل يزن مائة رطل ويحتاج إلى الحفاظ على مسار ثابت في الرياح والأمطار وحركة المرور.