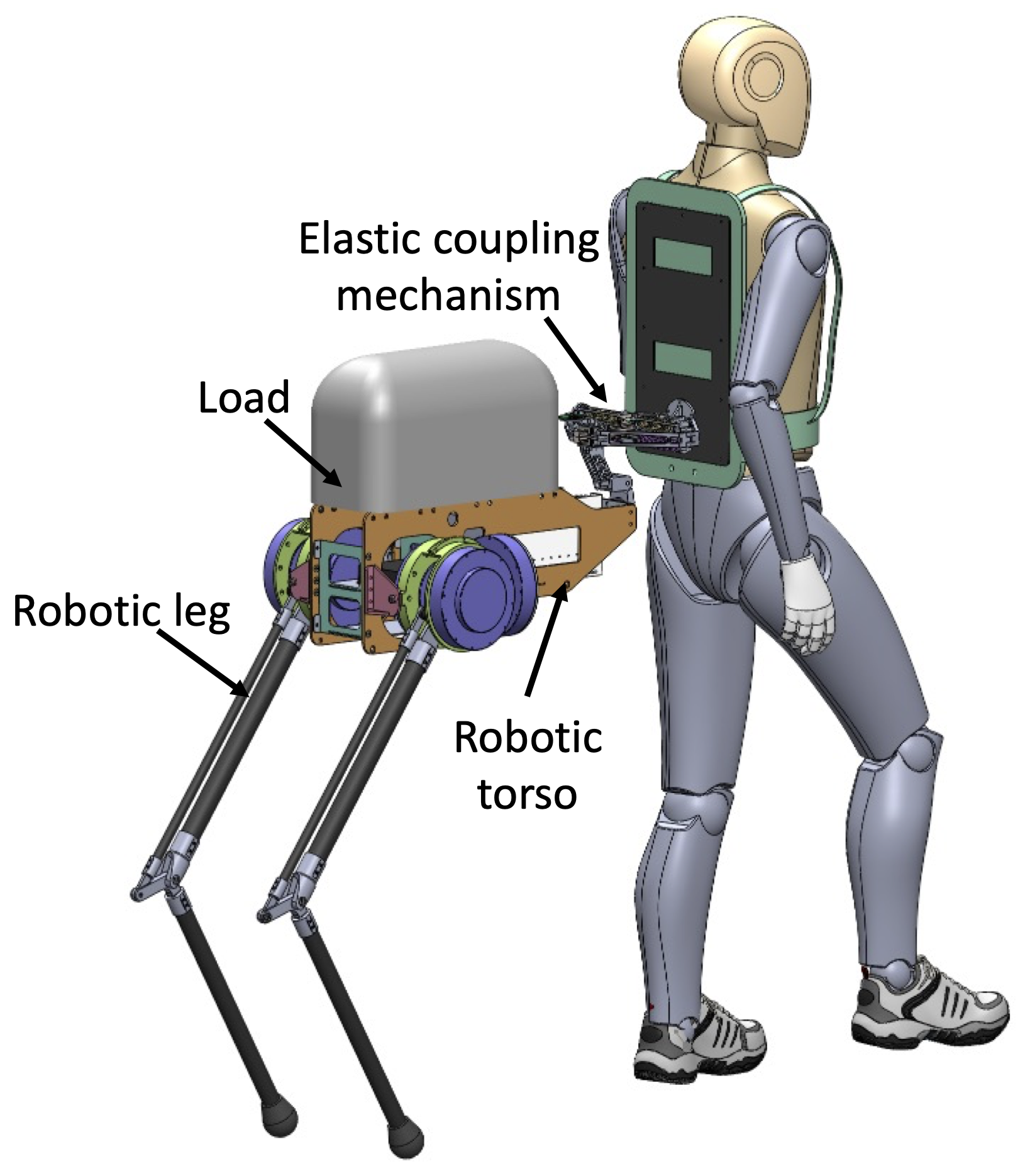
قام فريق البروفيسور فو تشنغ لونغ من الجامعة الجنوبية للعلوم والتكنولوجيا بتطوير روبوت مشي يحمل وزن القنطور يمكن ارتداؤه. وقد تم نشر النتائج ذات الصلة في مجلات موثوقة في مجال الروبوتات. تتمتع روبوتات الهيكل الخارجي التقليدية بكفاءة مساعدة منخفضة ويمكنها تقليل معدل الأيض البشري بنسبة 10% فقط.يكسر روبوت القنطور التصميم التقليدي ويستمد الإلهام من الشكل الحامل لأربعة أرجل. كأطراف مستقلة، فهي متصلة بظهر الإنسان من خلال واجهة اقتران مرنة يمكن ارتداؤها لبناء نظام رباعي الأرجل هجين بين الإنسان والآلة.
تم تجهيز الروبوت بآلية اقتران مرنة مخففة، والتي تتميز بخصائص صلابة غير خطية وتحقق فصلًا ديناميكيًا لمساعدة الطاقة والتوازن؛ جنبًا إلى جنب مع إطار التحكم التعاوني للتفاعل والمشي،يمكنه استشعار نية حركة جسم الإنسان في الوقت الفعلي، ومتابعتها في جميع الاتجاهات بدقة عالية دون تعليمات يدوية، وإخراج دفع أفقي مستقر في نفس الوقت.
يظهر التحقق التجريبي أن الروبوت يتمتع بأداء ممتاز. من حيث القدرة على المناورة، يمكنها إكمال دائرة الشكل "8" حول الكومة في مساحة ضيقة تبلغ 1 متر، والمرور بسلاسة عبر أسطح الطرق المعقدة مثل الدرجات والمنحدرات.
من حيث الأداء في تحمل الوزن،عند حمل وزن 20 كجم، تنخفض التكلفة الأيضية الصافية لجسم الإنسان بنسبة 35%، كما ينخفض الضغط على باطن القدمين بنسبة 52%.لا يوجد فرق كبير بين الثبات والمشي بدون حمل.
هذا الروبوت مناسب للإنقاذ في حالات الطوارئ، والاستكشاف الميداني، والدعم اللوجستي للتضاريس المعقدة وسيناريوهات أخرى، ومن المتوقع أن يخترق الحدود الفسيولوجية لجسم الإنسان في المستقبل.