عندما أعاد المهندسون في مدرسة الفنون التطبيقية الفيدرالية في لوزان (EPFL) في سويسرا التفكير في مفهوم "اليد"، فقد تخلوا عمدًا عن أحد الإعدادات الأساسية: يجب تثبيت اليد على الذراع. لقد طوروا يدًا آلية يمكنها الانفصال عن الذراع الآلية، والزحف على السطح مثل مخلوق صغير، والاقتراب من الأشياء والاستيلاء عليها من أي اتجاه تقريبًا، مما يوفر أداة تشغيل جديدة لمهام الفحص والصيانة الصناعية المستقبلية.
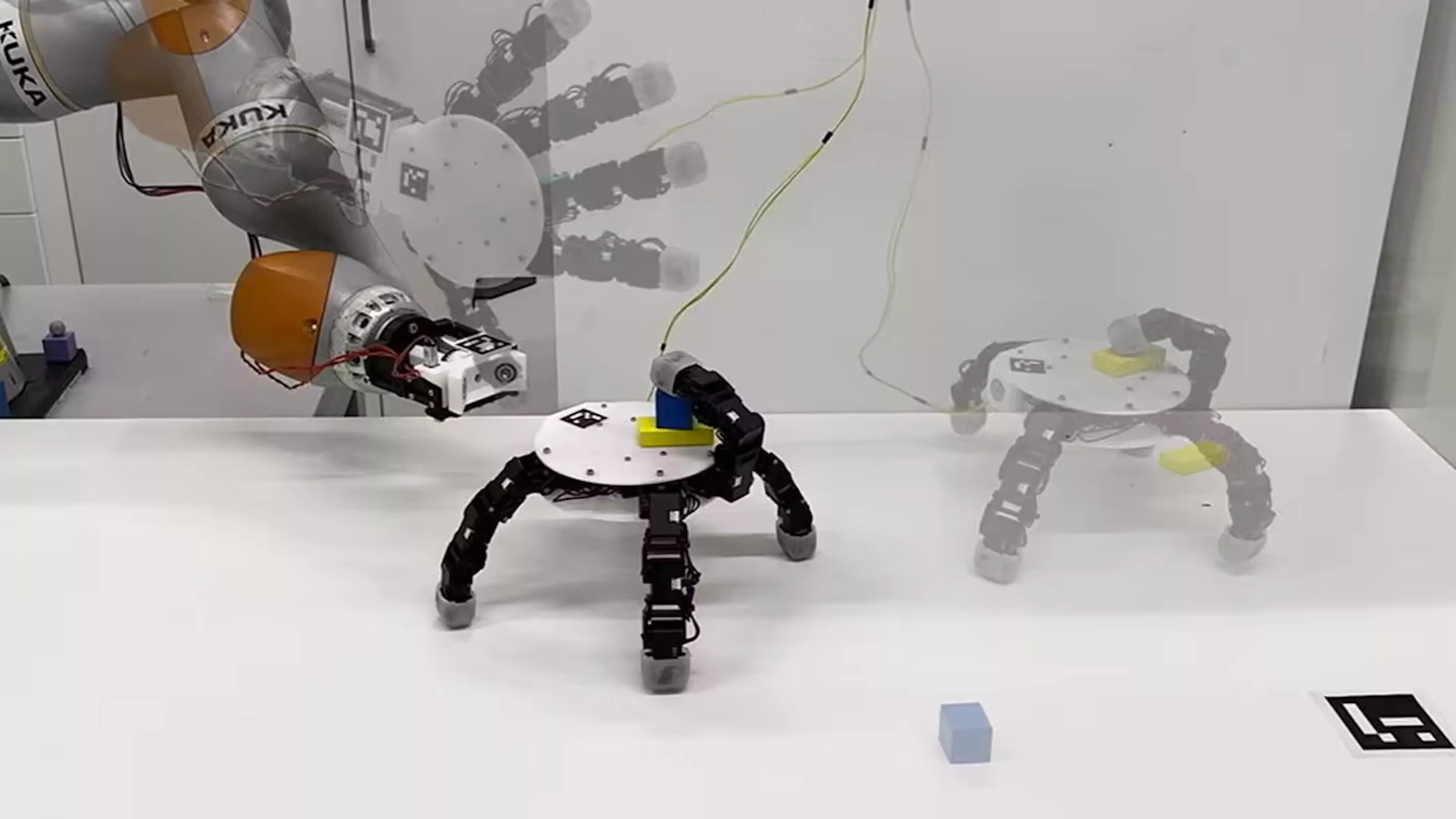
على عكس المناورات التقليدية، التي يتم تثبيتها في نهاية الذراع الآلية، فإن هذا الجهاز الجديد عبارة عن مناول "ثنائي الوضع": يمكن استخدامه كمؤثر نهائي عادي أو يمكنه التحرك بشكل مستقل بعد تحريره من الذراع الآلية. وبمجرد فصله، فإنه يعتمد على الحركات المنسقة بين أصابعه للزحف والدوران وتغيير موضعه في اتجاهات مختلفة للاقتراب بفعالية من الكائن المستهدف. يطمس هذا التصميم الحدود بين "الأطراف" و"الآلات المتنقلة" إلى حد ما، ويعتبره فريق البحث بمثابة تطور عملي لشكل الروبوت وليس مفهوم الخيال العلمي.
يقود المشروع جاو شياو، الذي أجرى بحثًا في EPFL وهو الآن في جامعة ووهان. وقال لصحيفة "فاينانشيال تايمز" إن هدف الفريق هو توسيع حدود ما يمكن أن تفعله "الأيدي" - سواء كانت بيولوجية أو ميكانيكية - في المهام التشغيلية. على عكس الأيدي البشرية، التي تعتمد على إبهام واحد لمعارضة الأصابع المتبقية، يمكن لكل إصبع من يد الروبوت هذه أن يشكل علاقة معارضة مع أي إصبع آخر. يمنح هذا الهيكل المضاد للأصابع النظام مرونة أكبر بكثير من اليد البشرية، مما يسمح له بالتبديل بين مجموعات الأصابع المختلفة للتعامل بدقة مع الأهداف بعدة طرق، مثل القرص أو التثبيت أو الرفع.
ومن حيث الابتكار الهيكلي، تتمتع هذه اليد أيضًا بالقدرة على "الإمساك في الاتجاهين، الأمامي والخلفي"، وهو ما لا تمتلكه الأيدي البشرية. أصابع الإنسان غير قادرة من الناحية الفسيولوجية على الإمساك بالأشياء بشكل فعال من الاتجاه الظهري لراحة اليد، ولكن هذا النظام يمكنه حمل الأشياء بثبات في كلا الاتجاهين الأمامي والخلفي. وهذا لا يسمح له فقط بالإمساك بأشياء متعددة في نفس الوقت، بل يفتح أيضًا مجالًا لـ "تعدد المهام بنفس اليد" عند التعامل مع الأدوات والأهداف.
في العرض التجريبي، أكملت يد الروبوت هذه عددًا من مهام التشغيل التي تتطلب عادةً تعاون يدين بشريتين، مثل فك غطاء الزجاجة أثناء تثبيت جسم الزجاجة، أو تطبيق عزم الدوران بأداة أخرى أثناء تثبيت قطعة العمل. من خلال الجدولة المرنة للمجموعات المتعارضة من الأصابع المختلفة، يمكنها محاكاة أو حتى تجاوز بعض أوضاع التشغيل في سيناريوهات التعاون التقليدية بين اليدين.
وأكد جاو شياو أن نقطة بداية تصميم الفريق كانت "التحكم الوظيفي" بدلاً من أغراض التخفي أو المراقبة. يعتقد الباحثون أن معظم سيناريوهات التطبيق المحتملة هي على الخط الأمامي للصناعة: فحص الحالة داخل خطوط الأنابيب أو المعدات، أو تفكيك وتجميع أجزاء الصيانة، أو استرداد قطع العمل المسقطة في المساحات الضيقة. في هذه التطبيقات، غالبًا ما لا تتمكن الأذرع الآلية التقليدية أو المشغلون البشريون من اختراق الموقع، في حين أن "الأيادي الزاحفة" الصغيرة والمتحركة بشكل مستقل يمكنها الوصول إلى المواقع التي يصعب الوصول إليها وتشغيلها.
ويتصور فريق البحث أن الأنظمة الروبوتية المستقبلية يمكن أن تجمع بين المنصات المتنقلة ومثل هذه الأيدي الآلية القابلة للفصل. تعد المنصة المتنقلة مسؤولة عن فحص المعدات والوصول إليها في المواقع المعقدة، بينما تنفصل يد الروبوت عن المنصة أو الذراع الآلية عند الضرورة وتتوغل في المساحات الضيقة لإكمال المهام مثل تنظيف الحطام أو تشغيل الصمامات أو الاستيلاء على المعدات. من المتوقع أن يؤدي هيكل تقسيم العمل والتعاون هذا إلى تحسين القدرة على التكيف ومعدل إنجاز المهام لأنظمة الأتمتة الصناعية في البيئات المعقدة.
وقد جذب هذا العمل أيضًا انتباه مجتمع الروبوتات. وعلق ديجبي تشابيل، الأستاذ المشارك في معهد الروبوتات بجامعة أكسفورد، بأن اليد الروبوتية هذه "مثيرة للاهتمام واستفزازية" ولها أهمية تنويرية في مجالات مثل الأتمتة الصناعية وأبحاث الأطراف الاصطناعية. وأشار إلى أنه على الرغم من أن سرعة الزحف للنموذج الأولي ليست سريعة جدًا في الوقت الحالي، إلا أن قدرته على تحقيق التآزر بين "الحركة والإمساك" تعيد بالفعل تعريف الشكل المحتمل لـ "الأيدي الآلية".
حاليًا، لا تزال هذه "اليد الزاحفة" في مرحلة النموذج الأولي المختبري. ومع ذلك، فقد أظهر بوضوح مسارًا مختلفًا تمامًا عن تقليد التشريح البشري: قد لا تقتصر الخطوة التالية للروبوتات على "مثل البشر"، ولكنها ستتطور في اتجاه أكثر قابلية للتكيف ومتعدد الأغراض ونموذجي حول الاحتياجات الصناعية والعملية.